-
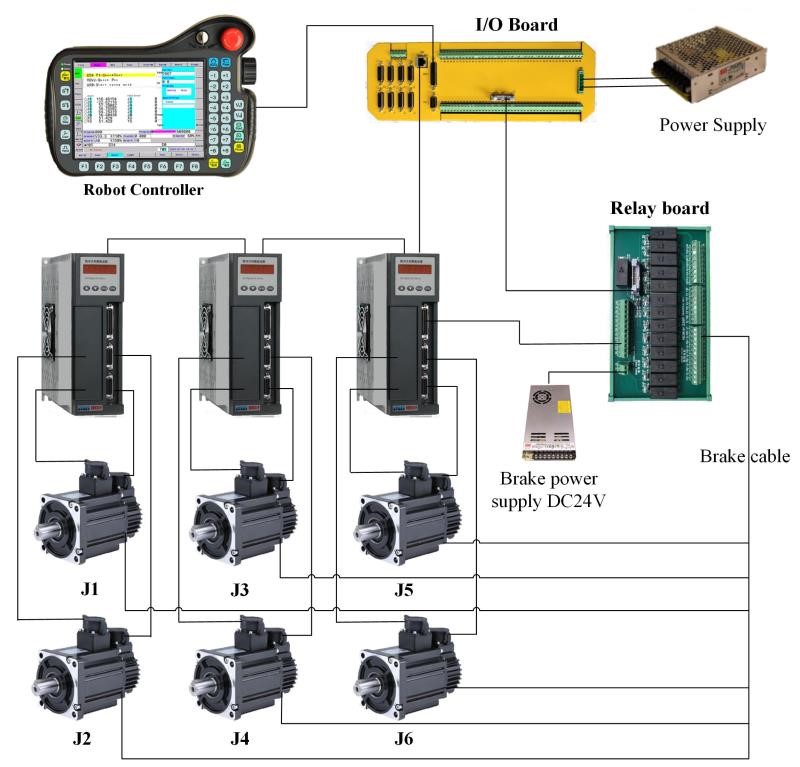
Basis Zesummesetzung vun industriell Roboteren
Aus der Perspektiv vun der Architektur kann de Roboter an dräi Deeler a sechs Systemer opgedeelt ginn, vun deenen déi dräi Deeler sinn: mechanesch Deel (benotzt fir verschidden Aktiounen ze realiséieren), Sensing Deel (benotzt fir intern an extern Informatioun z'erkennen), Kontrolldeel (Kontrolléiere vum Roboter fir verschidde ...Liest méi -
CNC machining Zentrum programméiere Kompetenzen Strategie
Fir CNC-Maschinn ass d'Programméierung ganz wichteg, wat direkt d'Qualitéit an d'Effizienz vun der Maschinn beaflosst. Also wéi séier d'Programméierungskompetenzen vun CNC Bearbechtungszentren beherrschen? Loosst eis zesummen léieren! Pause Kommando, G04X(U)_/P_ bezitt sech op d'Tool Pauszäit (Fütterstopp, d'Spindel ...Liest méi -

Siwen technesch Héichpunkter vun der Entwécklung Trend vun CNC Maschinn Handwierksgeschir an China.
Aspekt 1: Zesummesetzung Maschinnen Tools sinn am Ascendant. Dank der mächteger Kontrollfäegkeet vun High-End CNC-Maschinnen-Tools, ëmmer méi sophistikéiert Design- a Fabrikatiounstechnologie, an ëmmer méi reife Applikatiounstechnologie abegraff Programméierung, Compound Maschinn Tools, mat hirem ...Liest méi






